The YRC1000 can utilize the Modbus TCP communication functionality with the ACP01 board standard LAN port (using CN106 or CN107 connectors). This enables Modbus TCP (CPU board) communication functionality within the YRC1000.
It is important to note that when using Modbus TCP communication, the robot side can only operate as a slave device.
By using the IO send/receive functionality of Modbus TCP (CPU board), the YRC1000 can exchange external IO signals and register data with other Modbus TCP-compatible devices.
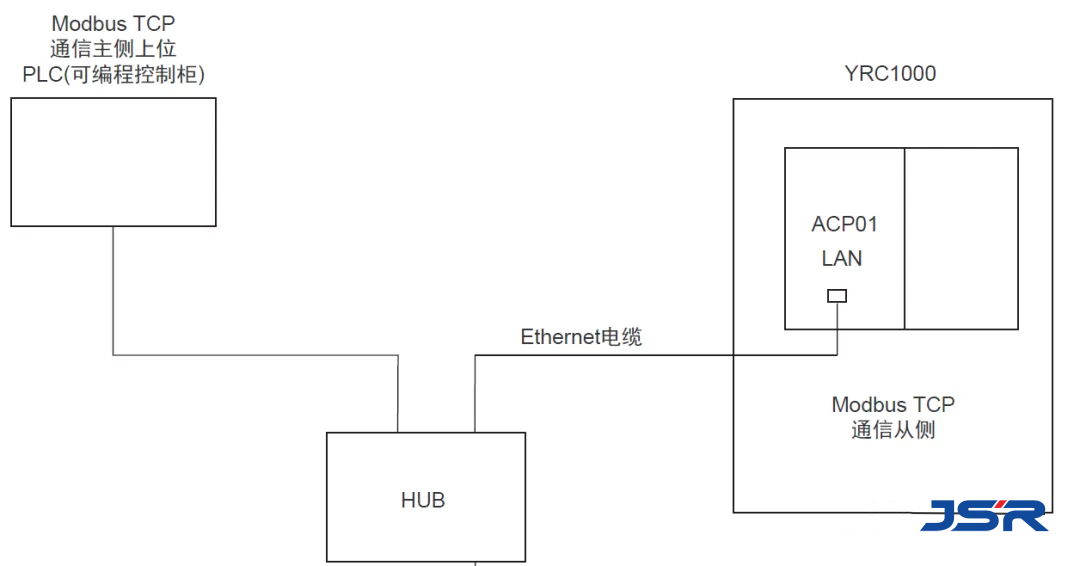
Below is a system configuration diagram for YRC1000 when using the Modbus TCP (CPU board):
Note: Due to language differences, there may be misunderstandings. Feel free to contact JSR Automation for clarification. We also provide spare parts and technical support as needed. sophia@sh-jsr.com
Post time: Jan-26-2026
